config_file = 'RD_RPS'
figure_id = 'supp17'
config = ParticleGraphConfig.from_yaml(f'./config/{config_file}.yaml')
device = set_device("auto")Training GNN on reaction-diffusion (rock-paper-scissors)
Mesh
GNN Training
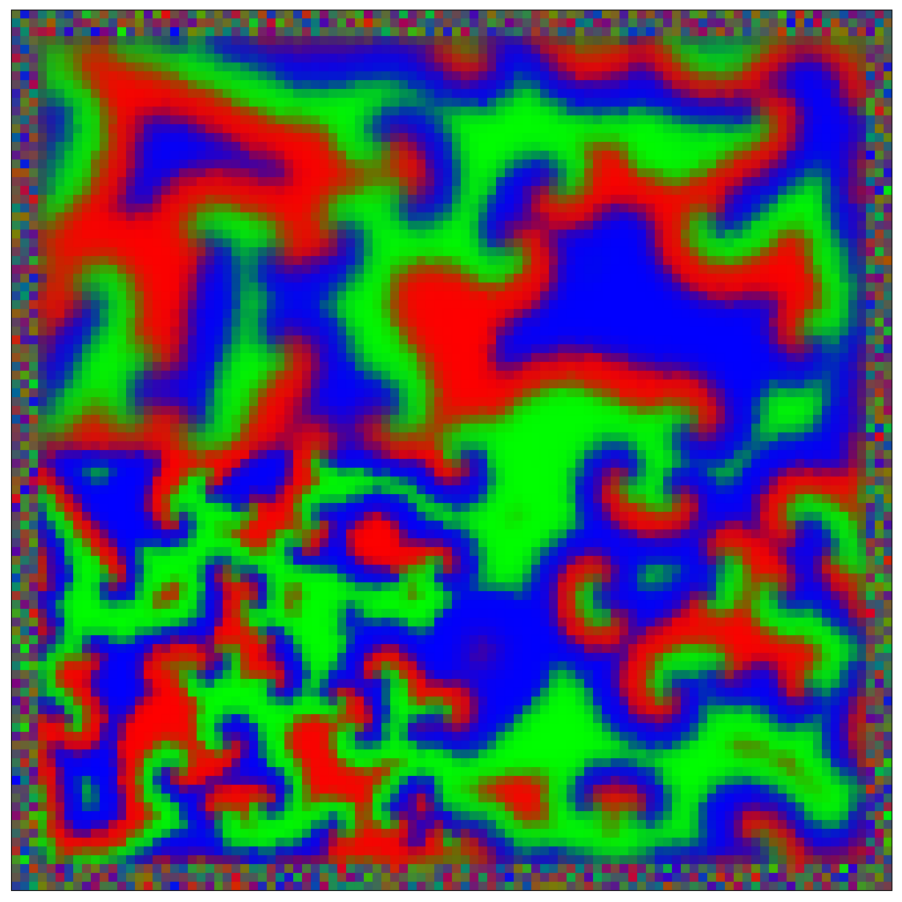
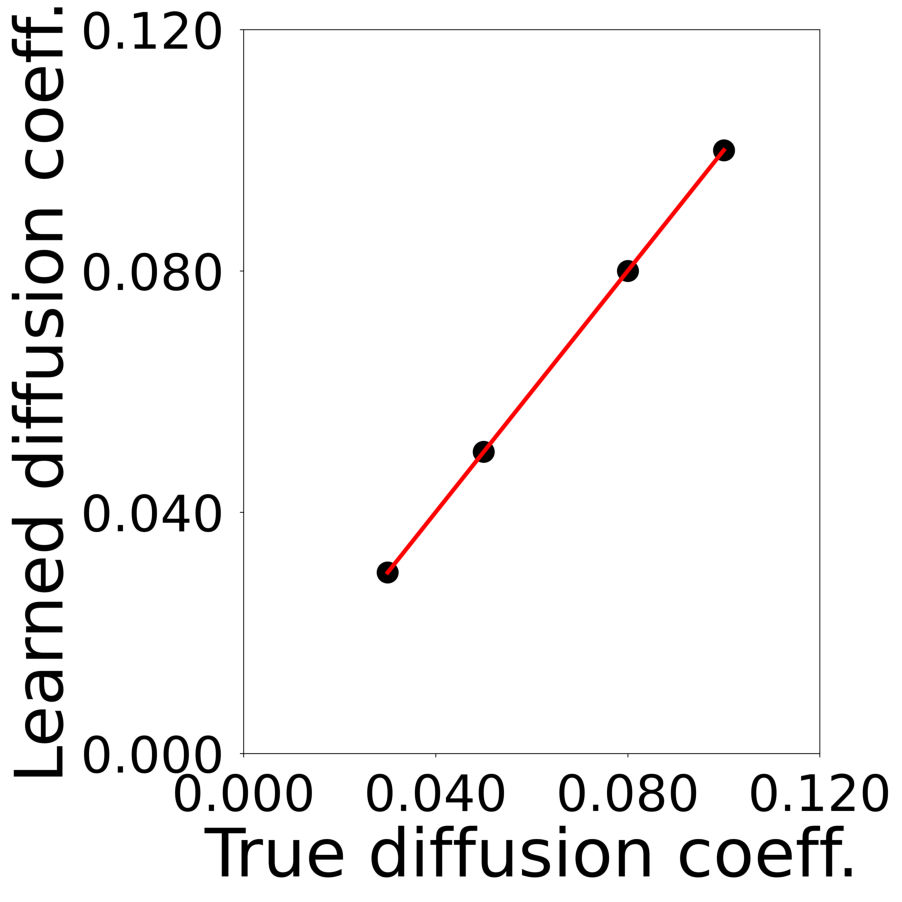
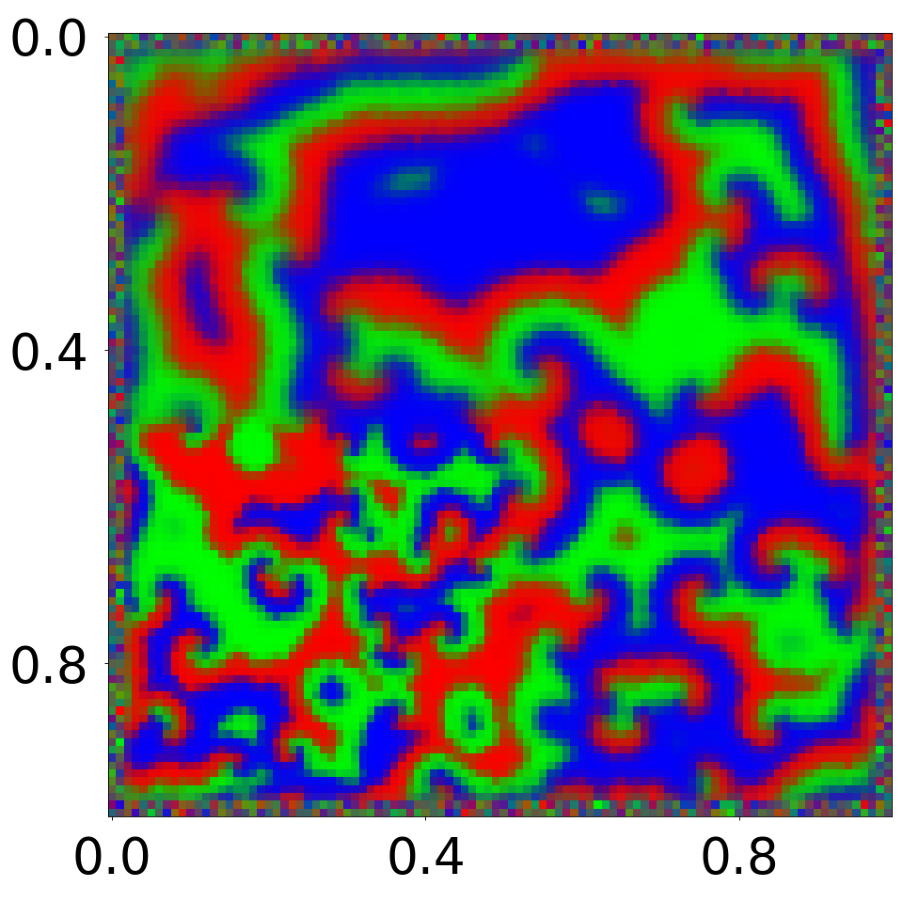
This script generates Supplementary Figure 17. It showcases a Graph Neural Network (GNN) learning the dynamics of a reaction-diffusion system. The training simulation involves 1E4 mesh nodes observed over 4E3 frames. Node interactions follow rock-paper-scissors rules with different diffusion coefficients.
First, we load the configuration file and set the device.
The following model is used to simulate the ‘rock-paper-scissor’ model with PyTorch Geometric.
class RDModel(pyg.nn.MessagePassing):
"""Interaction Network as proposed in this paper:
https://proceedings.neurips.cc/paper/2016/hash/3147da8ab4a0437c15ef51a5cc7f2dc4-Abstract.html"""
"""
Compute the reaction diffusion according to the rock paper scissor model.
Inputs
----------
data : a torch_geometric.data object
Note the Laplacian coeeficients are in data.edge_attr
Returns
-------
increment : float
the first derivative of three scalar fields u, v and w
"""
def __init__(self, aggr_type=[], bc_dpos=[], coeff = []):
super(RDModel, self).__init__(aggr='add') # "mean" aggregation.
self.bc_dpos = bc_dpos
self.coeff = coeff
self.a = 0.6
def forward(self, data):
x, edge_index, edge_attr = data.x, data.edge_index, data.edge_attr
c = self.coeff
uvw = data.x[:, 6:9]
laplace_uvw = c * self.propagate(data.edge_index, uvw=uvw, discrete_laplacian=data.edge_attr)
p = torch.sum(uvw, axis=1)
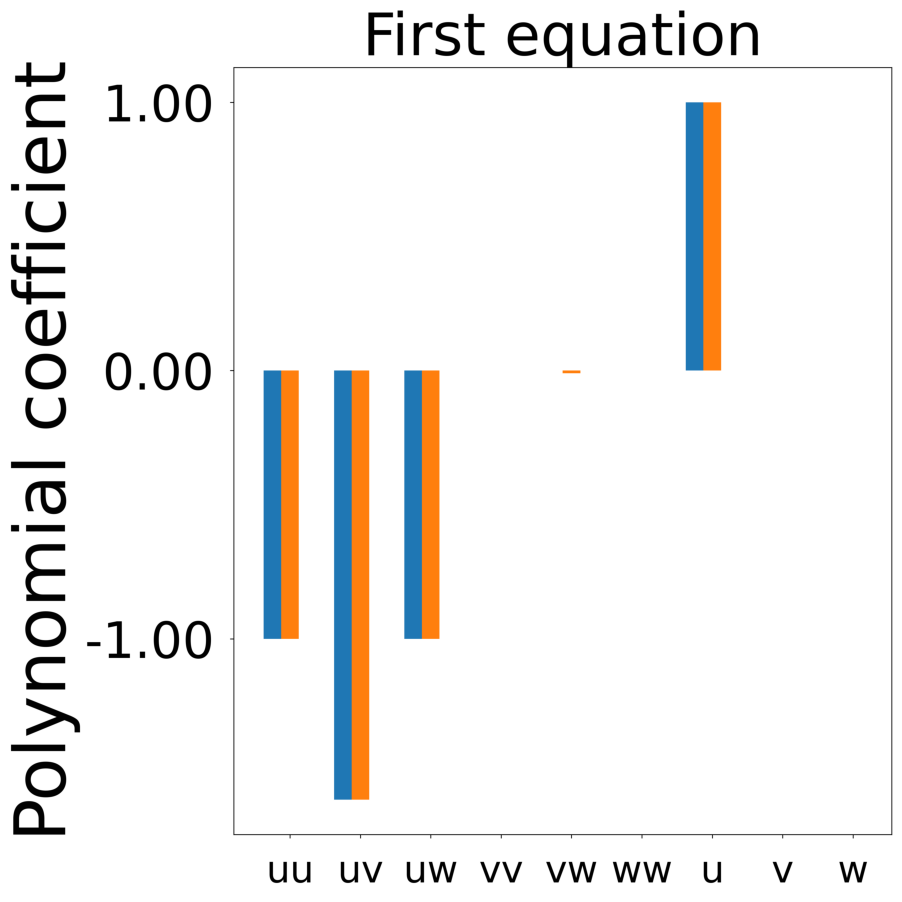
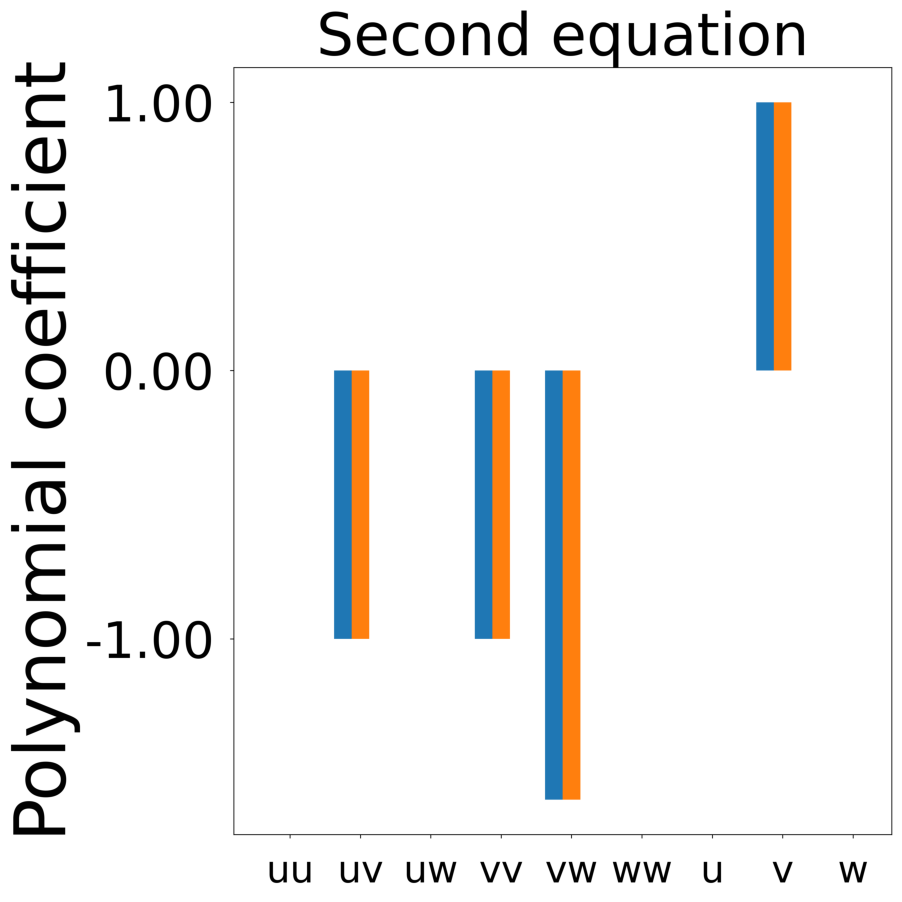
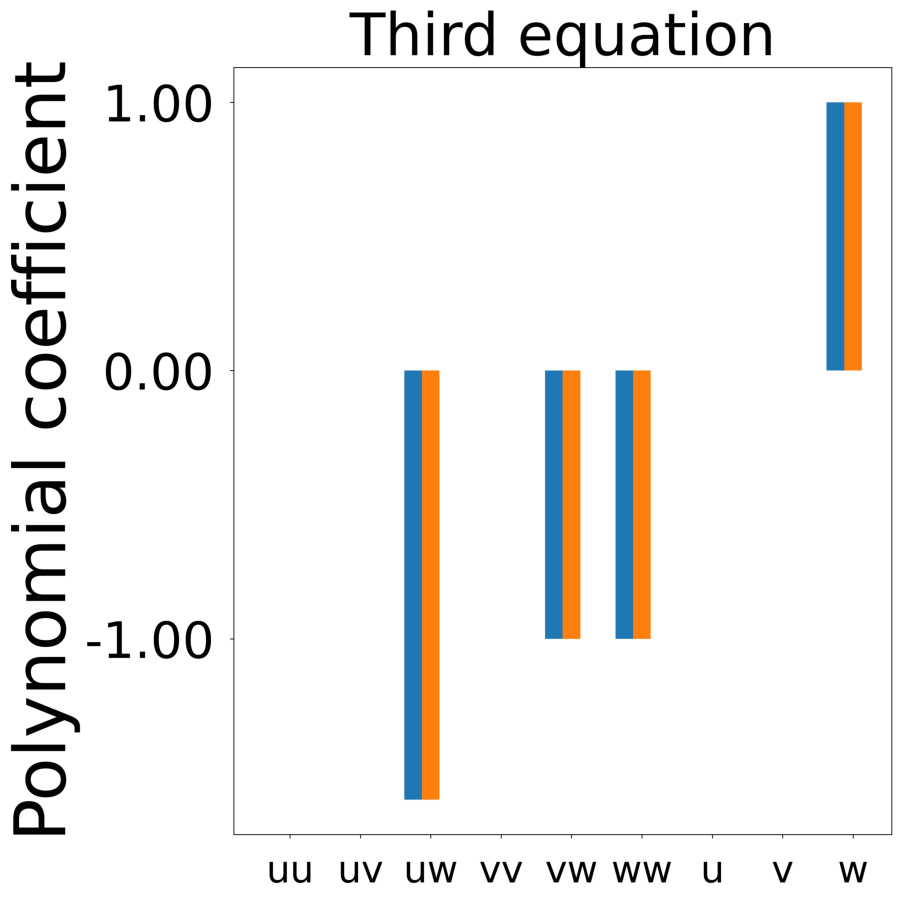
d_uvw = laplace_uvw + uvw * (1 - p[:, None] - self.a * uvw[:, [1, 2, 0]])
# This is equivalent to the nonlinear reaction diffusion equation:
# du = D * laplace_u + u * (1 - p - a * v)
# dv = D * laplace_v + v * (1 - p - a * w)
# dw = D * laplace_w + w * (1 - p - a * u)
return d_uvw
def message(self, uvw_j, discrete_laplacian):
return discrete_laplacian[:, None] * uvw_j
def bc_pos(x):
return torch.remainder(x, 1.0)
def bc_dpos(x):
return torch.remainder(x - 0.5, 1.0) - 0.5The coefficients of diffusion are loaded from a tif file specified in the config yaml file and the data is generated.
Vizualizations of the reaction diffusion can be found in “decomp-gnn/paper_experiments/graphs_data/RD_RPS/”
If the simulation is too large, you can decrease n_particles and n_nodes in “RD_RPS.yaml”.
model = RDModel(
aggr_type='add',
bc_dpos=bc_dpos)
generate_kwargs = dict(device=device, visualize=True, run_vizualized=0, style='color', erase=False, save=True, step=50)
train_kwargs = dict(device=device, erase=True)
test_kwargs = dict(device=device, visualize=True, style='color', verbose=False, best_model='20', run=0, step=20)
data_generate_mesh(config, model , **generate_kwargs)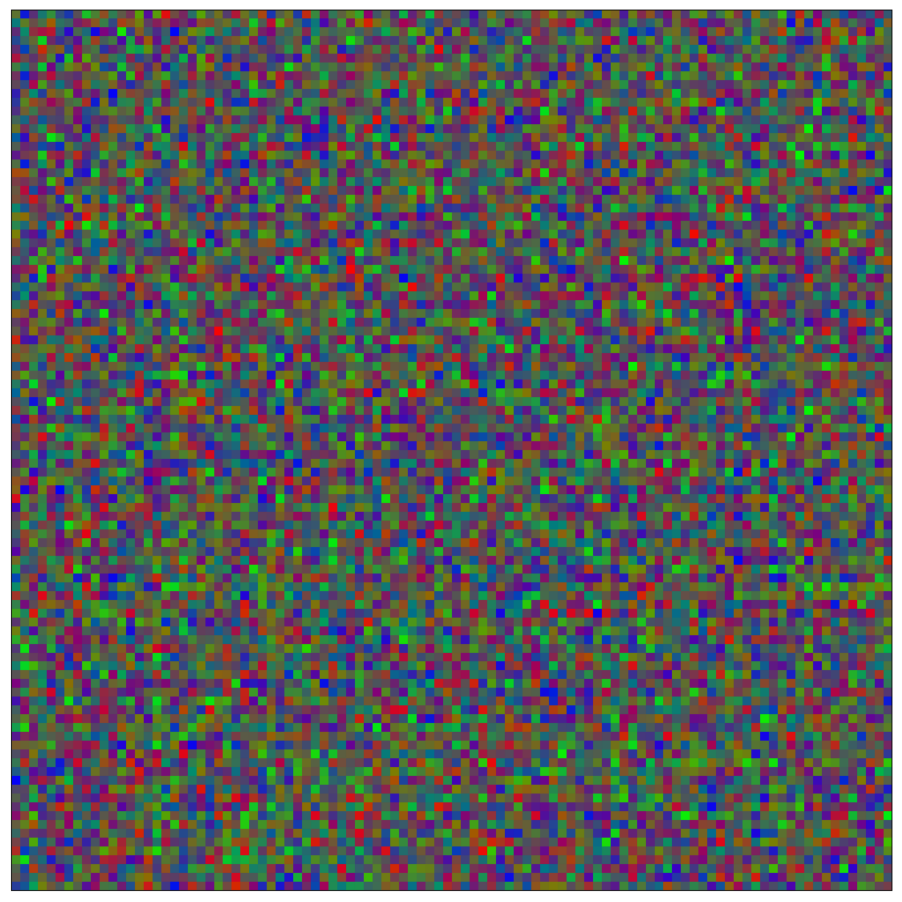
The GNN model (see src/ParticleGraph/models/Mesh_RPS.py) is optimized using the ‘rock-paper-scissor’ data.
Since we ship the trained model with the repository, this step can be skipped if desired.
if not os.path.exists(f'log/try_{config_file}'):
data_train(config, config_file, **train_kwargs)The model that has been trained in the previous step is used to generate the rollouts. The rollout visualization can be found in paper_experiments/log/try_RD_RPS/tmp_recons.
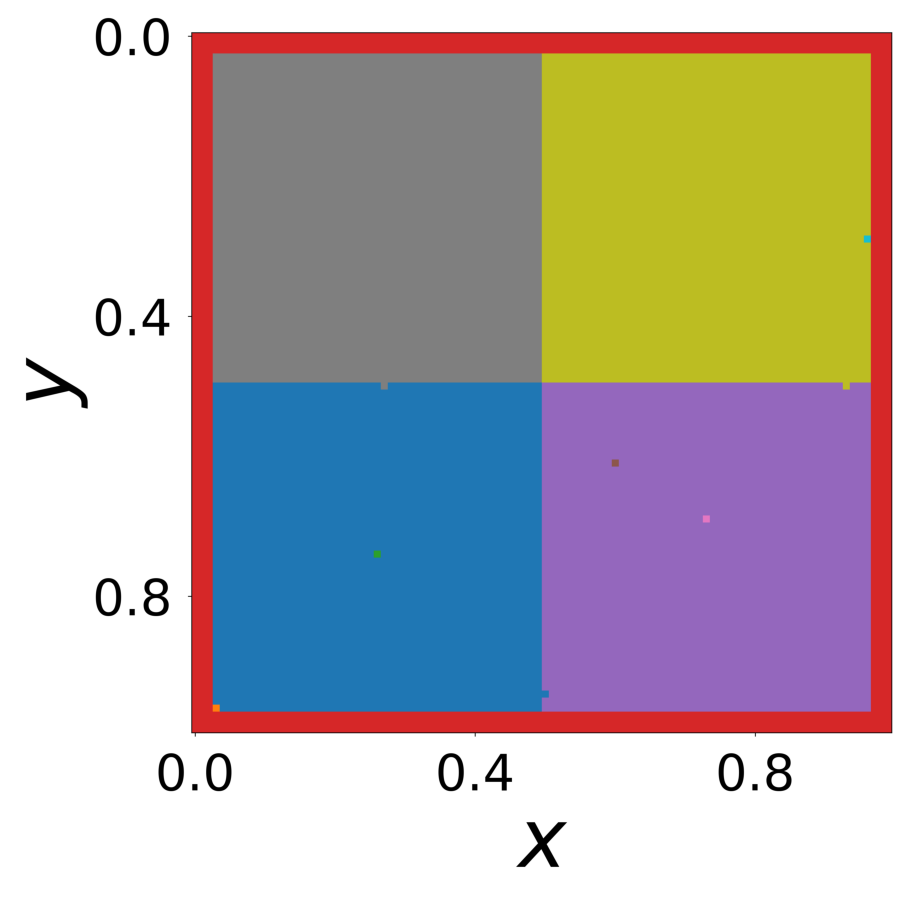
data_test(config, config_file, **test_kwargs)Finally, we generate the figures that are shown in Supplementary Figure 17. The results of the GNN post-analysis are saved into ‘decomp-gnn/paper_experiments/log/try_RD_RPS/results’.
config_list, epoch_list = get_figures(figure_id, device=device)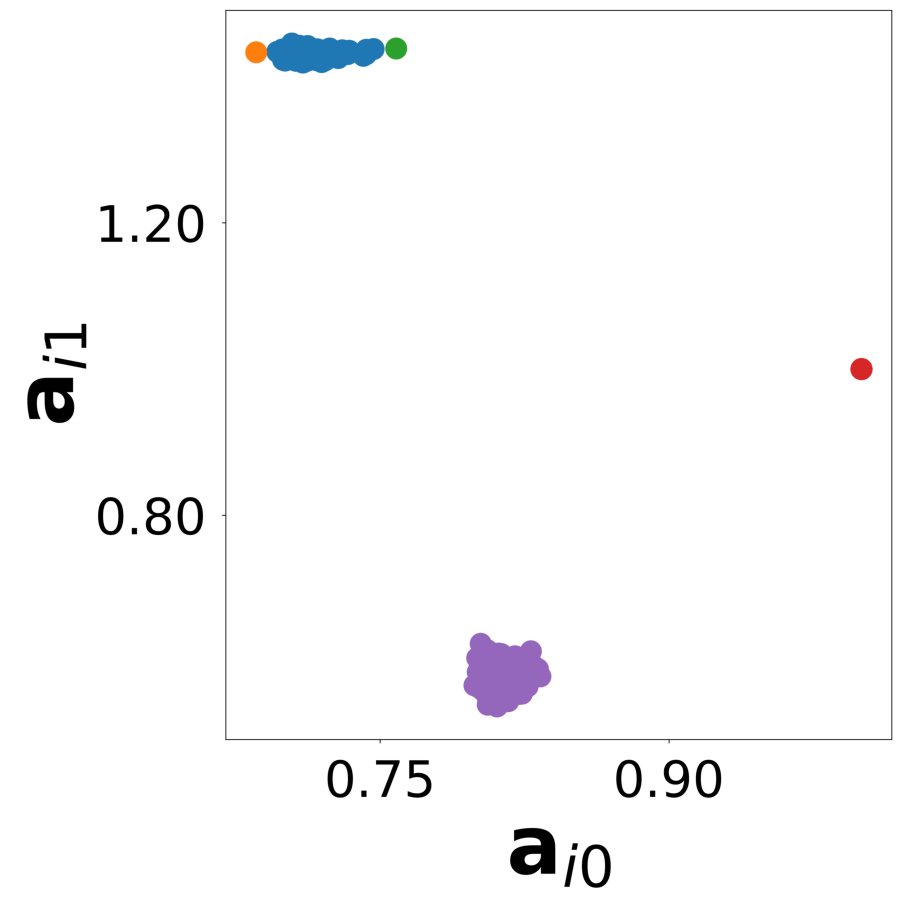
All frames can be found in “decomp-gnn/paper_experiments/log/try_RD_RPS/tmp_recons/”