config_file = 'arbitrary_3'
config = ParticleGraphConfig.from_yaml(f'./config/{config_file}.yaml')
device = set_device("auto")Attraction-repulsion system with 3 particle types
Particles
Simulation
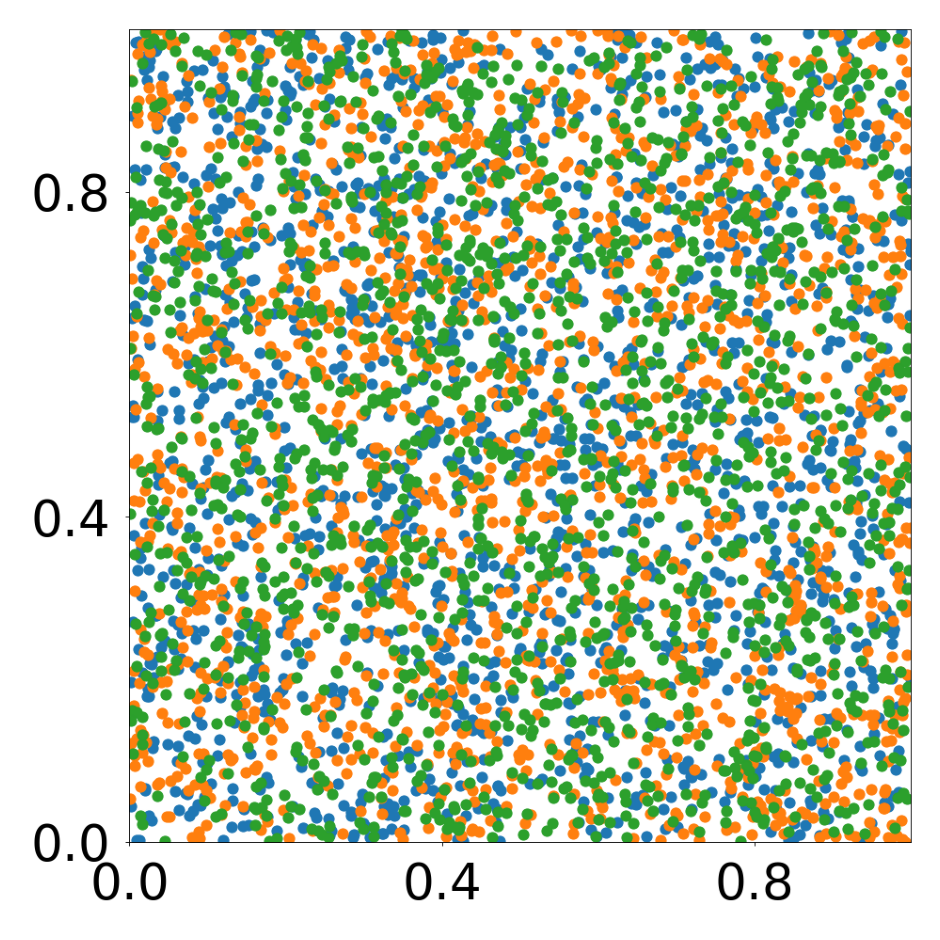
This script creates the first column of paper’s Figure 2. Simulation of an attraction-repulsion system, 4800 particles, 3 particle types.
First, we load the configuration file and set the device.
The following model is used to simulate the attraction-repulsion system with PyTorch Geometric.
class AttractionRepulsionModel(pyg.nn.MessagePassing):
"""
Compute the speed of particles as a function of their relative position according to an attraction-repulsion law.
The latter is defined by four parameters p = (p1, p2, p3, p4) and a parameter sigma.
See https://github.com/gpeyre/numerical-tours/blob/master/python/ml_10_particle_system.ipynb
"""
def __init__(self, p, sigma, bc_dpos, dimension=2):
super(AttractionRepulsionModel, self).__init__(aggr='mean')
self.p = p
self.sigma = sigma
self.bc_dpos = bc_dpos
self.dimension = dimension
def forward(self, data: Data):
x, edge_index = data.x, data.edge_index
edge_index, _ = pyg_utils.remove_self_loops(edge_index)
particle_type = to_numpy(x[:, 1 + 2 * self.dimension])
parameters = self.p[particle_type,:]
d_pos = self.propagate(edge_index, pos=x[:, 1:self.dimension + 1], parameters=parameters)
return d_pos
def message(self, pos_i, pos_j, parameters_i):
relative_position = self.bc_dpos(pos_j - pos_i)
distance_squared = torch.sum(relative_position ** 2, dim=1) # squared distance
f = (parameters_i[:, 0] * torch.exp(-distance_squared ** parameters_i[:, 1] / (2 * self.sigma ** 2))
- parameters_i[:, 2] * torch.exp(-distance_squared ** parameters_i[:, 3] / (2 * self.sigma ** 2)))
velocity = f[:, None] * relative_position
return velocity
def bc_pos(x):
return torch.remainder(x, 1.0)
def bc_dpos(x):
return torch.remainder(x - 0.5, 1.0) - 0.5The data is generated with the above Pytorch Geometric model. Note two datasets are generated, one for training and one for validation. If the simulation is too large, you can decrease n_particles (multiple of 3) in “arbitrary_3.yaml”.
p = torch.squeeze(torch.tensor(config.simulation.params))
sigma = config.simulation.sigma
model = AttractionRepulsionModel(
p=p,
sigma=sigma,
bc_dpos=bc_dpos,
dimension=config.simulation.dimension
)
generate_kwargs = dict(device=device, visualize=True, run_vizualized=0, style='color', alpha=1, erase=True, save=True, step=10)
train_kwargs = dict(device=device, erase=True)
test_kwargs = dict(device=device, visualize=True, style='color', verbose=False, best_model='20', run=0, step=1, save_velocity=True)
data_generate_particles(config, model, bc_pos, bc_dpos, **generate_kwargs)Finally, we generate the figures that are shown in Figure 2. All frames are saved in ‘decomp-gnn/paper_experiments/graphs_data/arbitrary_3/Fig/’.